
ONGOING PROJECTS
- Development of Remote Radiation Detection Imaging System Mounted on a Drone
- High Resolution SPECT using Variable Pinhole Collimator
- Positioning Algorithm for CZT Virtual Frisch-grid Detector
- Multi-purpose Super-resolution Gamma Detector
- Multi-pinhole SPECT
- Low Profile Light Guide using Diffusion Film
- Advanced Reconstruction for Radiation imaging (ARRA)
COMPLETED PROJECTS
- Reconstruction of Dose Distribution in In-beam PET for Carbon Theraphy
- Image Registration for Breast Cancer Study
- High Energy Collimator Design for I-131
- Plasma-Display-Panel based X-ray Detector (PXD)
- CCD based Gamma Camera
- Abdomen Registration for PET/CT and MR images
- Performance Optimization by Patient Dose Analysis and Image Quality Assessment in CT Fluoroscopy
- Cone-beam based system matrix for a pixelated SPECT detector
- Development of Time-of-Flight Method for Improvement of Signal-to-Noise Ratio
Development of Remote Radiation Detection Imaging System Mounted on a Drone
Introduction
The nuclear accident that occurred in Fukushima, Japan, in 2011 was catastrophic and was caused by tsunamis. The subsequent earthquakes resulted in large radiation leaks and exposure due to insufficient initial responses to the disaster. To avoid such radiation disasters and prevent widespread radioactive contamination, the exact cause of the disasters should be rapidly identified, analyzed, and addressed. Radiation monitoring systems enable unmanned remote detection in the event of a disaster, prevent unnecessary exposure of workers, and collect information on the targets. To obtain rapid and accurate responses, a wide area should be monitored, and a gamma camera with a constant uniformity over the detection area is required.
Goal
This project aims to develop drone based remote radiation detection & imaging system, enabling fast initial response by accurately identifying radiation source and analyzing degree of contamination in real time, regardless of geographic hardship of accessibility.
Materials and Methods
A. Environment analysis for designing drone-based remote radiation detection & imaging system
We analyzed the targeted situations under the assumption of radiation disasters and determined target scope and selection of a drone for remote radiation detection.
B. Development of a sub-miniature gamma camera to be mounted on a drone
We developed high sensitivity diverging collimator, data acquisition (DAQ) system, and prototype drone-mounted gamma camera module and runned initial performance test. The design and realized version is shown in Fig. 1.
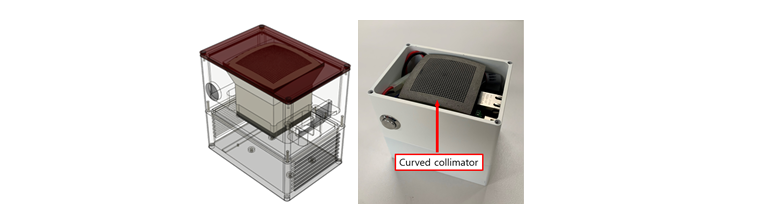
Fig. 1. 3D design of sub-miniature gamma camera(left) and the realized system(right).
C. Development of a prototype of drone interface module for a sub-miniature gamma camera
We developed pseudo communication module and gamma camera-drone-user communication module for two-sided communication between the user and detection module. In Fig. 2, you can see the prototype of DRIS system with drone and gamma camera along with graphic user interface based on Android system.

Fig. 2. The prototype of DRIS system(left) and interface of DRIS(right) .
Results and Conclusion
We developed the sub-miniature gamma camera for use in a multimodal imaging system. The camera included the gamma-ray detector with sub-millimeter resolution, front-end electronics modules,and the diverging hole collimator.We achieved sub-miniature gamma camera to be mounted on drone with size of 7 × 7 × 10 cubic centimeter. As shown in Fig. 3, we achieved 18% energy resolution from Cs-137 source. The gamma camera achieved the performance of 0.8 mm spatial resolution with Cs-137, and the result is shown in Fig. 4.
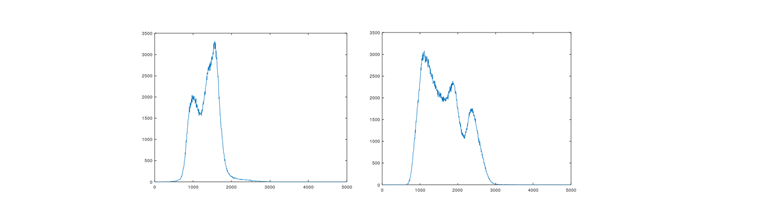
Fig. 3. The result of energy spectrum from Ba-133(left) and Cs-137(right) for evaluating energy resolution.

Fig. 4. The results of gamma camera's flood map (left) and peak profile(right) acquired from Cs-137 source.
We designed diverging collimators with various collimator heights, septal thicknesses, and hole lengths, depending on the collimator surface shape, and we examined their theoretical performance. We achieved point source images located at the center of the FOV and the edge by 80% of the FOV and compared the counts and PBR values. Considering the improvement in performance, a diverging collimator with a height of 30 mm and a septal thickness of 0.3 mm was selected for manufacturing. We designed a diverging collimator with a conventional flat surface and a new concept of a curved surface, which has constant hole lengths for all acceptance angles to improve the uniformity of the diverging collimator. For high energy source target, as shown in Fig.5 and Fig.6, we developed curved diverging collimator with high uniformity for wide detection range: weight 837 g, height 30 mm, septal thickness 0.3 mm without excessing the payload of designated drone.

Fig. 5. Simulation result of difference in total counts(left) and signal counts(right) via septal thickness.
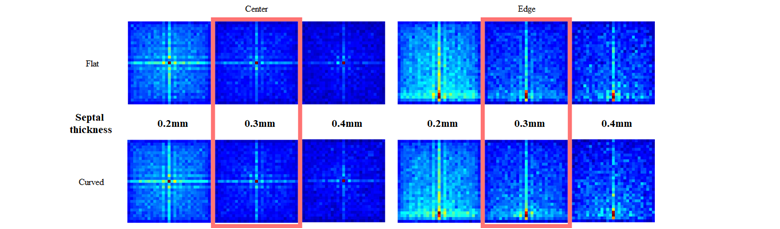
Fig. 6. Simulation result image of flat & diverging collimator with height of 30cm, with different FOV.
In addition, we developed signal processing & DAQ modules for detecting optical and radiographic images and transmitting registration data to user terminal with >1 kcps count rate and gamma camera-drone-user communication module and operation software for realtime gamma data transmission.
Participating Researchers







